車載イベントカメラによるオプティカルフロー推定
イベントカメラを使ったオプティカルフロー推定のための,車の運動特徴と拡張焦点 (Focus of Expansion:FOE)に関する性質を利用した,車載カメラシーンに特化した正則化を提案する.FOEはカメラの並進軸と画像平面の交点で定義され,自車の運動による周囲環境物のオプティカルフローから回転による成分を除いた時,オプティカルフローはFOEから放射状になるという特徴がある.提案する正則化は,この特徴を用いてオプティカルフローの向きに制約をつけるものである.手法の途中で推定する回転パラメータを評価することで,この正則化の有用性を示した.
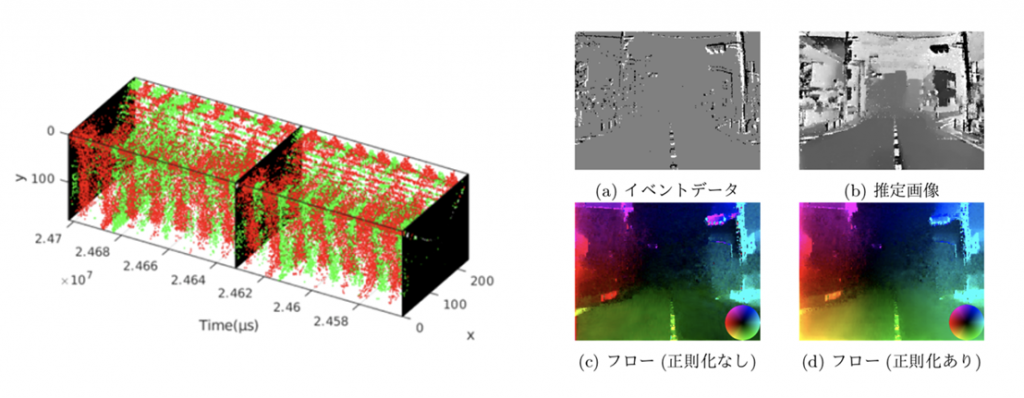
右:オプティカルフロー推定結果(色相がフローの向きを表し,明度が大きさを表している)
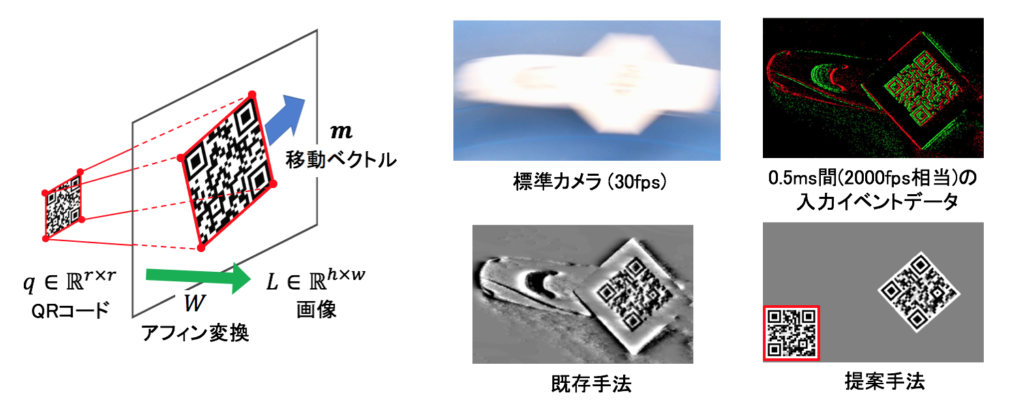
イベントカメラを用いた照明条件やぶれに頑健な二次元コード認識
工場の自動化において生産ラインでのQRコードの読み取りが重要になっているが,照明条件やベルトコンベアの速さによってブレが生じてしまう問題がある.この問題に対し,イベントカメラは輝度の変化を画素毎に非同期に捉えるカメラで,高時間分解能やハイダイナミックレンジなどの優れた特徴を持つ.本研究では,画像をQRコードとアフィン変換によって表現し,画像空間より制約がかかったQRコード空間で最適化を行うことで,イベントデータからQRコードロバストに推定する手法を提案した.
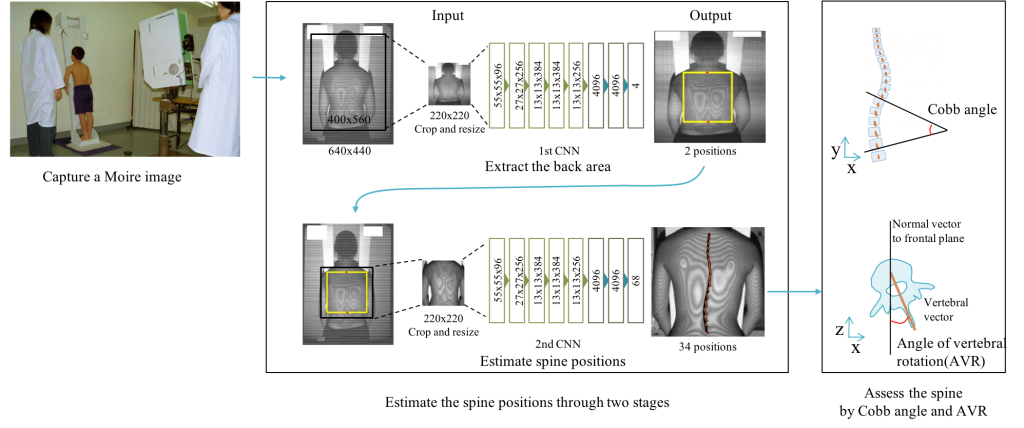
背面モアレ画像からの脊柱配列推定による側弯症スクリーニング
本研究では,X線被曝のない被験者の背面モアレ画像を入力とし,全自動で側彎症スクリーニングに必要なCobb角,およびVR角を算出する手法を提案している.モアレ画像とレントゲン画像を用い,レントゲン画像から専門医が脊柱の特徴点座標を抽出したものを教師データとしてCNNの学習を行うことで,モアレ画像のみから高精度に脊柱配列座標を推定する手法,および脊柱配列情報から自動的にCobb角,VR角を算出する方法を提案している.独自に構築したデータセットを対象に,提案手法の有効性を示した.現在,背面の3Dスキャンデータからの3次元脊柱配列推定手法について検討している.