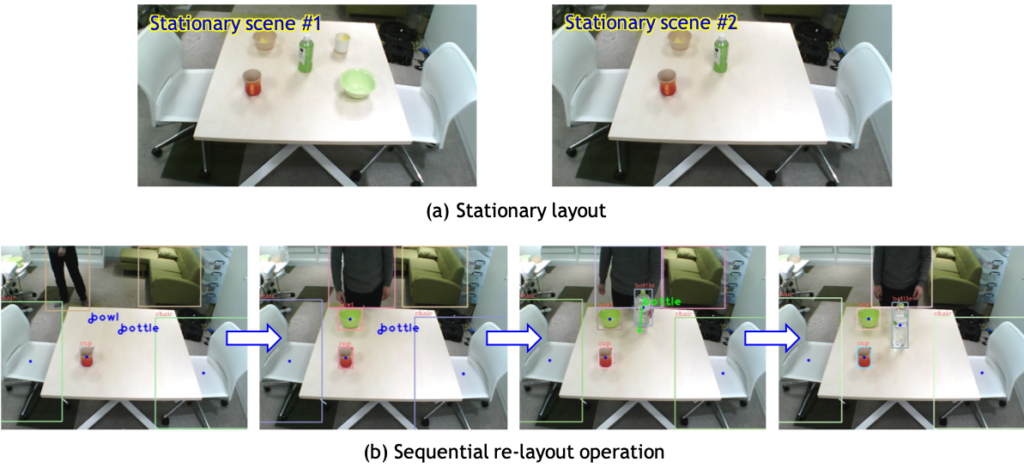
定常配置の学習に基づく物体の操作方法推定
不自然な配置の物体を自然な配置に復元するために必要な操作を推定する手法を提案する.提案手法は物体の操作を推定するための特別な層を配置したエンコーダ・デコーダ型のネットワークである.定常なシーンのレイアウトを与えるだけで,Self-supervisedに物体の配置変更手順を学習可能である.実画像に対する実験において,入力シーンを定常な状態に変更するための操作をリアルタイムで生成できることを確認した.
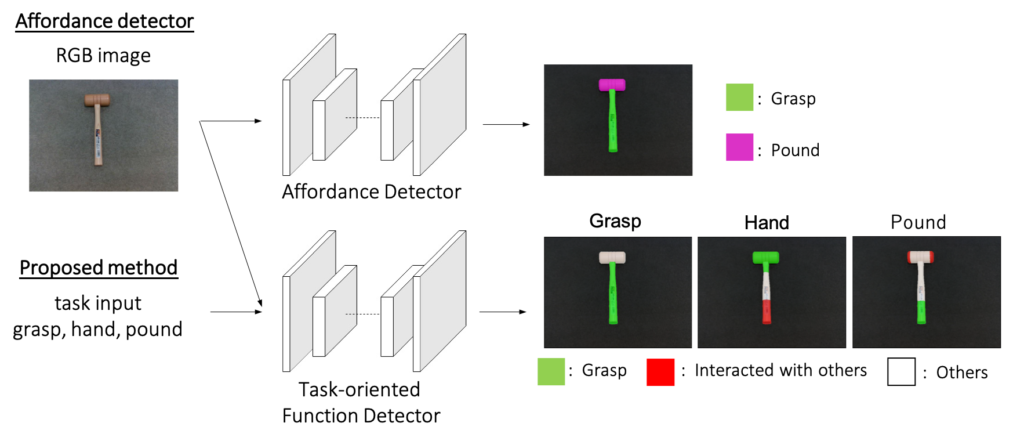
操作タスク入力に基づく物体の機能部推定
ロボットが単一の物体に対して,複数の扱 い方を行うための,物体のタスクに応じた機能部の記述方法である,タスク指向な機能部を提案した.アフォーダンスと異なり,タスク指向な機能部では,物体に対してタスクごとに機能部が存在するため,単一の物体に対し複数の扱い方を記述できる. 加えて,タスク指向な機能部を学習するためのデータセットの作成し,その推定方法を提案した.1200枚6000ラベルを含む自作のデータセットにおいて mean IOUは0.80を達成した.
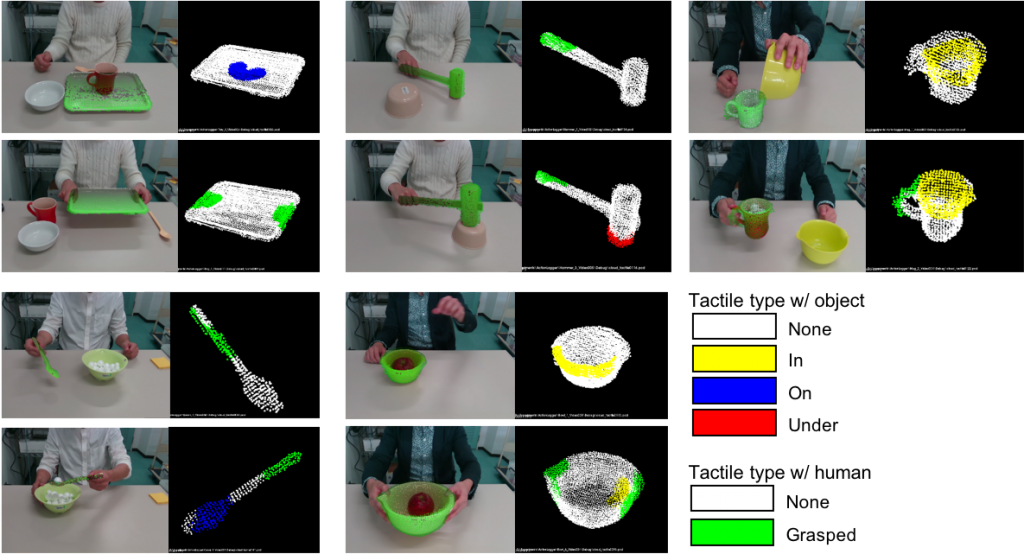
Tactile Logging:人間動作解析に基づく物体表面への操作履歴の記述手法
RGB-D動画として撮影された人間による道具操作のデモンストレーションを解析する手法を提案する.提案手法では,人間の姿勢と操作対象の物体の3次元的な位置姿勢を追跡しながら,物体に発生するインタラクションを推定する.この結果を物体の3Dモデルの表面に時系列的な使用履歴(Tactile Log)として記録する.Tactile Logは物体の理想的な使用方法を顕在化するための新しいデータ表現であり,ロボットアームによる”自然な”道具の把持や取り扱い動作の生成に利用することが可能である.
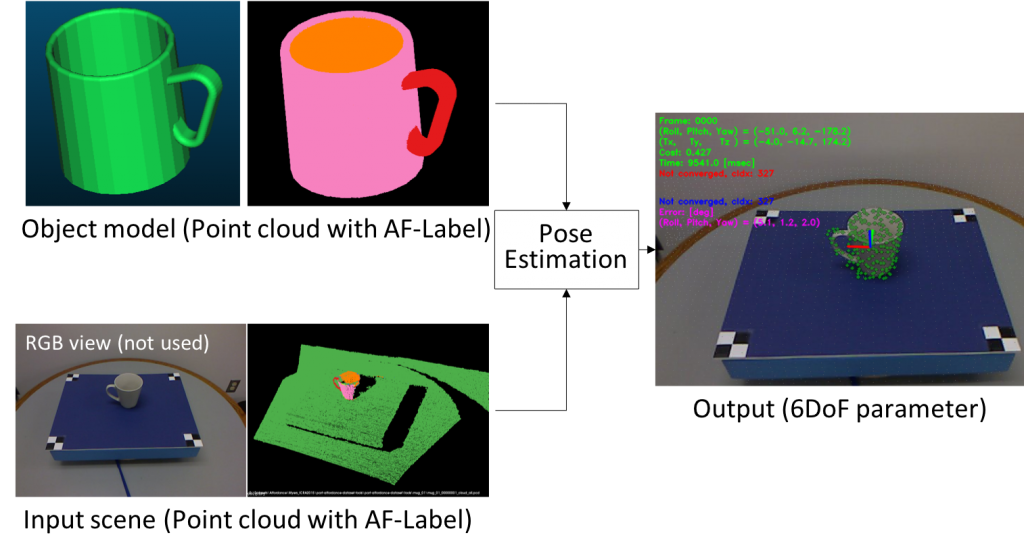
機能属性の空間配置に着目した類似形状物体の6自由度姿勢推定
対象物と同一の3Dモデルが存在しない場合おいても動作可能な6自由度姿勢推定手法を提案する.同一カテゴリの道具同士は,意匠が異なっていたとしても各部位の役割(機能属性)の配置は共通的であると考えられる.提案手法ではこれを姿勢推定の手がかりとする.機能属性の配置間の整合性と形状同士の整合性を同時に最適化することによって,姿勢推定の信頼性が向上することを確認した.実利用時には対象となるカテゴリの物体の3Dモデル1つにさえ機能属性や把持方法を関連付けておけば,そのまま現物の物体を取り扱うことが可能なので,対象物ごとにモデルデータを用意する必要がなくなるという利点がある.